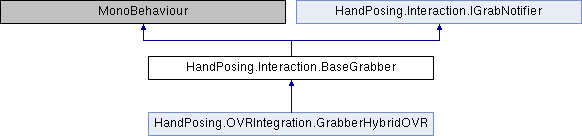
Sample implementation for a Grabber (without dependencies) that works with the snapping system. Inherit from this class to be able to reuse the provided Grabber-Grabbable classes or completely implement (or adapt!) your own by implementing the much smaller IGrabNotifier. This grabbed does not only takes care of detecting a grab but also if the user intended to grab and it failed.
More...
|
| abstract float | CurrentFlex () |
| | Current normalised value of the grabbing gesture. 1 for a fully realised gesture, 0 for no gesture detected. More...
|
| |
| Snappable | FindClosestSnappable () |
| | The snappable with the best score that can be reached at the current pose. Typically all grabbable objects will also have snappables, and the Grabber would already implement a metho to find the nearest grabbable,this could be very similar. More...
|
| |
| void | ForceRelease (Grabbable grabbable) |
| | Release a grabbable from this grabber. More...
|
| |
| void | ForceUntouch (Grabbable grabbable) |
| | Unsuscribe an object from the list of touched grabbables. The object will not be a grabbing candidate until it is touched again. More...
|
| |
| virtual void | OffhandGrabbed (Grabbable grabbable) |
| | Release an object without throwing it. More...
|
| |
|
void | OnTriggerEnter (Collider otherCollider) |
| |
|
void | OnTriggerExit (Collider otherCollider) |
| |
|
| Action< GameObject, float > | OnGrabTimedEnded |
| | Callback indicating that a grab finished and how long it was held. More...
|
| |
|
|
virtual void | Reset () |
| |
|
virtual void | Awake () |
| |
|
virtual void | OnEnable () |
| |
|
virtual void | OnDisable () |
| |
|
virtual void | OnDestroy () |
| |
|
virtual void | Update () |
| |
| void | CheckForGrabOrRelease (float prevFlex, float currentFlex) |
| | Checks the current grabbing gesture and tries to grab/release/approach a grabbable. This key method triggers the callbacks for the snapping system. More...
|
| |
| virtual void | GrabFailed () |
| | When a grab attempt fails, set the state accordingly and trigger the relevant callbacks like OnGrabAttemptFail More...
|
| |
| void | NearGrab (float factor) |
| | Triggers how close the grabber is to start grabbing a nearby object, informing the snapping system. More...
|
| |
| virtual void | GrabBegin () |
| | Search for a nearby object and grab it. More...
|
| |
| virtual void | Grab (Grabbable closestGrabbable) |
| | Attach a given grabbable to the hand, storing the offset to the hand so it can be kept while holding. More...
|
| |
| virtual void | MoveGrabbedObject (Vector3 pos, Quaternion rot) |
| | Update the grabbed object position/rotation using the offset recorded when the grab started. More...
|
| |
| virtual void | GrabEnd (bool canGrab=true) |
| | Releases the current grabbed object More...
|
| |
| void | ReleaseGrabbedObject (Vector3 linearVelocity, Vector3 angularVelocity) |
| | Throw the current grabbed object. More...
|
| |
|
Grabbable | FindClosestGrabbable () |
| |
|
| abstract | Vector3 |
| | Relative velocities of the hand for throwing. More...
|
| |
|
| Grabbable | GrabbedObject = null [get] |
| | Current grabbed object. More...
|
| |
| Action< bool > | OnIgnoreTriggers [get, set] |
| | Callback that indicates that the detection trigger has been enabled/disabled More...
|
| |
|
Action< GameObject > | OnGrabStarted [get, set] |
| |
|
Action< GameObject, float > | OnGrabAttemp [get, set] |
| |
|
Action< GameObject > | OnGrabEnded [get, set] |
| |
|
Action< GameObject > | OnGrabAttemptFail [get, set] |
| |
|
abstract Vector2 | GrabFlexThreshold [get] |
| |
| abstract Vector2 | GrabAttemptThreshold [get] |
| | Range for detecting that grab failed. Typically narrower than GrabFlexThreshold. More...
|
| |
| abstract float | ReleasedFlexThreshold [get] |
| | Indicates the minimum value for a grab Typically a bit higher than the minimum GrabFlexThreshold More...
|
| |
 Properties inherited from HandPosing.Interaction.IGrabNotifier Properties inherited from HandPosing.Interaction.IGrabNotifier |
| Action< GameObject > | OnGrabStarted [get, set] |
| | Event triggered when a Grab is started at a GameObject. More...
|
| |
| Action< GameObject, float > | OnGrabAttemp [get, set] |
| | Event triggered when a Grab is attempted at a GameObject. More...
|
| |
| Action< GameObject > | OnGrabAttemptFail [get, set] |
| | Event triggered when a grabbed GameObjec if user tried to make a grab attempt sometime in the past More...
|
| |
| Action< GameObject > | OnGrabEnded [get, set] |
| | Event triggered when a grabbed GameObject is released. More...
|
| |
| Vector2 | GrabFlexThreshold [get] |
| | Min - Max value for the grab thresold. X indicates the release point, Y the grab point. Typically [0.33,0.9] or even [0,1] More...
|
| |
Sample implementation for a Grabber (without dependencies) that works with the snapping system. Inherit from this class to be able to reuse the provided Grabber-Grabbable classes or completely implement (or adapt!) your own by implementing the much smaller IGrabNotifier. This grabbed does not only takes care of detecting a grab but also if the user intended to grab and it failed.
◆ CheckForGrabOrRelease()
| void HandPosing.Interaction.BaseGrabber.CheckForGrabOrRelease |
( |
float |
prevFlex, |
|
|
float |
currentFlex |
|
) |
| |
|
protected |
Checks the current grabbing gesture and tries to grab/release/approach a grabbable. This key method triggers the callbacks for the snapping system.
- Parameters
-
| prevFlex | Last grabbing gesture strength, normalised. |
| currentFlex | Current gragginb gesture strength, normalised. |
◆ ClearAllGrabs()
| static void HandPosing.Interaction.BaseGrabber.ClearAllGrabs |
( |
Grabbable |
grabbable | ) |
|
|
static |
Unsuscribe all the objects grabbed by all hands.
- Parameters
-
◆ CurrentFlex()
| abstract float HandPosing.Interaction.BaseGrabber.CurrentFlex |
( |
| ) |
|
|
pure virtual |
◆ FindClosestSnappable()
| Snappable HandPosing.Interaction.BaseGrabber.FindClosestSnappable |
( |
| ) |
|
The snappable with the best score that can be reached at the current pose. Typically all grabbable objects will also have snappables, and the Grabber would already implement a metho to find the nearest grabbable,this could be very similar.
- Returns
- If found, the best object that the hand can snap to.
Implements HandPosing.Interaction.IGrabNotifier.
◆ ForceRelease()
| void HandPosing.Interaction.BaseGrabber.ForceRelease |
( |
Grabbable |
grabbable | ) |
|
Release a grabbable from this grabber.
- Parameters
-
| grabbable | The grabbable to be released. |
◆ ForceUntouch()
| void HandPosing.Interaction.BaseGrabber.ForceUntouch |
( |
Grabbable |
grabbable | ) |
|
Unsuscribe an object from the list of touched grabbables. The object will not be a grabbing candidate until it is touched again.
- Parameters
-
| grabbable | The grabbable to be unsuscribed |
◆ Grab()
| virtual void HandPosing.Interaction.BaseGrabber.Grab |
( |
Grabbable |
closestGrabbable | ) |
|
|
protectedvirtual |
Attach a given grabbable to the hand, storing the offset to the hand so it can be kept while holding.
- Parameters
-
| closestGrabbable | The object to be grabbed. |
Reimplemented in HandPosing.OVRIntegration.GrabberHybridOVR.
◆ GrabBegin()
| virtual void HandPosing.Interaction.BaseGrabber.GrabBegin |
( |
| ) |
|
|
protectedvirtual |
Search for a nearby object and grab it.
◆ GrabEnd()
| virtual void HandPosing.Interaction.BaseGrabber.GrabEnd |
( |
bool |
canGrab = true | ) |
|
|
protectedvirtual |
Releases the current grabbed object
- Parameters
-
| canGrab | If the hand can grab again anything within reach after this release. Set False if the grab was ended artifially, not by the user actually ungrasping. |
◆ GrabFailed()
| virtual void HandPosing.Interaction.BaseGrabber.GrabFailed |
( |
| ) |
|
|
protectedvirtual |
When a grab attempt fails, set the state accordingly and trigger the relevant callbacks like OnGrabAttemptFail
◆ MoveGrabbedObject()
| virtual void HandPosing.Interaction.BaseGrabber.MoveGrabbedObject |
( |
Vector3 |
pos, |
|
|
Quaternion |
rot |
|
) |
| |
|
protectedvirtual |
Update the grabbed object position/rotation using the offset recorded when the grab started.
- Parameters
-
| pos | Current position of the grabber. |
| rot | Current rotation of the grabber. |
◆ NearGrab()
| void HandPosing.Interaction.BaseGrabber.NearGrab |
( |
float |
factor | ) |
|
|
protected |
Triggers how close the grabber is to start grabbing a nearby object, informing the snapping system.
- Parameters
-
| factor | Current normalised value for the grab attemp, 1 indicates a grab. |
◆ OffhandGrabbed()
| virtual void HandPosing.Interaction.BaseGrabber.OffhandGrabbed |
( |
Grabbable |
grabbable | ) |
|
|
virtual |
Release an object without throwing it.
- Parameters
-
| grabbable | Object to release |
◆ ReleaseGrabbedObject()
| void HandPosing.Interaction.BaseGrabber.ReleaseGrabbedObject |
( |
Vector3 |
linearVelocity, |
|
|
Vector3 |
angularVelocity |
|
) |
| |
|
protected |
Throw the current grabbed object.
- Parameters
-
| linearVelocity | Linear velocity of the throw. |
| angularVelocity | Angular velocity of the throw. |
◆ OnGrabTimedEnded
| Action<GameObject, float> HandPosing.Interaction.BaseGrabber.OnGrabTimedEnded |
Callback indicating that a grab finished and how long it was held.
◆ Vector3
| abstract HandPosing.Interaction.BaseGrabber.Vector3 |
|
protected |
Relative velocities of the hand for throwing.
- Parameters
-
| to | The point at which to measure the velocity. |
- Returns
- The linear and angular velocity of the hand at the given pose.
◆ GrabAttemptThreshold
| abstract Vector2 HandPosing.Interaction.BaseGrabber.GrabAttemptThreshold |
|
get |
Range for detecting that grab failed. Typically narrower than GrabFlexThreshold.
◆ GrabbedObject
| Grabbable HandPosing.Interaction.BaseGrabber.GrabbedObject = null |
|
get |
◆ OnIgnoreTriggers
| Action<bool> HandPosing.Interaction.BaseGrabber.OnIgnoreTriggers |
|
getset |
Callback that indicates that the detection trigger has been enabled/disabled
◆ ReleasedFlexThreshold
| abstract float HandPosing.Interaction.BaseGrabber.ReleasedFlexThreshold |
|
get |
Indicates the minimum value for a grab Typically a bit higher than the minimum GrabFlexThreshold
The documentation for this class was generated from the following file:
- Runtime/Interaction/BaseGrabber.cs